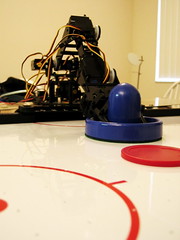
 Four blog posts later and we’ve arrived at the last nostalgia blog post in the series. Ready for the story about the air hockey table that grew a Lynxmotion robot arm and learned how to play? Great! In the fall of 2004, I signed up to take a Video Processing course as a follow-up to the Digital Image Processing (DIP) course I had taken with Dr. Oge Marques (Blog – Twitter). As with the DIP course, the Video Processing coursework included a term project of our choosing. I decided that it would be interesting to extend the functionality of the DIP project somehow but was not sure quite what to do. At some point along the way during the brainstorming, I remembered a robotic air hockey table I had seen when I was touring a college a few years back. That particular robotic air hockey table worked by using sensors embedded in the table surface to locate the puck as it moved and feeding that information to a robot arm. I decided to see if I could simply the idea by replacing the embedded sensors with a cheap USB web camera …
Four blog posts later and we’ve arrived at the last nostalgia blog post in the series. Ready for the story about the air hockey table that grew a Lynxmotion robot arm and learned how to play? Great! In the fall of 2004, I signed up to take a Video Processing course as a follow-up to the Digital Image Processing (DIP) course I had taken with Dr. Oge Marques (Blog – Twitter). As with the DIP course, the Video Processing coursework included a term project of our choosing. I decided that it would be interesting to extend the functionality of the DIP project somehow but was not sure quite what to do. At some point along the way during the brainstorming, I remembered a robotic air hockey table I had seen when I was touring a college a few years back. That particular robotic air hockey table worked by using sensors embedded in the table surface to locate the puck as it moved and feeding that information to a robot arm. I decided to see if I could simply the idea by replacing the embedded sensors with a cheap USB web camera …
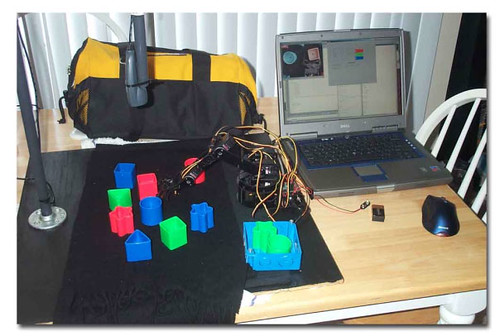
As the second post of the series and representing another nostalgic trip down memory lane, this post is dedicated to the first robotic vision system that I ever built.